首页 ›
陪诊医院 ›
位移传感器 › HK-LVDT差动式位移传感器
HK-LVDT差动式位移传感器
发布时间:2015-5-20 点击数量:5964

|
详细说明
|
|
一、HK-LVDT位移传感器原理及用途:
LVDT位移传感器是基于变压器原理。通过一次线圈与二次线圈弱电磁藕合,使得铁芯的位移变化量与输出电讯号(电压或电流)变化量呈精密线性关系,可以直接把机械变化量转变为标准电讯号供给电脑数据采集或PLC进行过程控制。HK-LVDT位移传感器DC系列产品是将传感器线圈和电子线路安装在一个不锈钢管里,实现了机电一体化,具有较强的抗干扰能力。该系列产品具有行程大、精度高、稳定性好、安装使用方便等优点。是位移、距离、伸长、移动、厚度、振动、膨胀、液位、压缩,应变等等物理量的检测和分析的有力工具。HK-LVDT位移传感器广泛应用于航天、航空、电力、石油化工、机械、军工、纺织、汽车、煤炭、地震监测、高等院校及科研院所等领域,即可以与仪表配套使用,也可以单独使用。
二、HK-LVDT位移传感器技术指标及型号:
WY-DC位移传感器
1、灵敏度(mv/v/mm):100-1000
2、初级励磁电压:5V(3-8)
3、动态频率:0-200HZ(3DB)标准 0-800HZ最高(动态位移测量)
4、灵敏度漂移:零点:0.01(%/℃) 满度:0.025(%/℃)
5、负载阻抗:20KΩ
6、工作温度:-20℃+70℃标准 -40℃+150℃(耐高低温)
7、高精度:0.05%
8、高分辨率:0.001um
9、供电电压:6VDC 12VDC 15VDC 24VDC ±9VDC ±12VDC ±15VDC
10、输出电压:0——5V 0——10V 0——±5V 0——±10V
输出电流:0——10mA 0--20mA 4--20mA
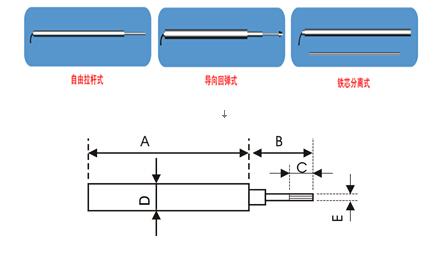
WY-DC位移传感器外形结构图
|
型号
|
量程(mm)
|
精度
|
A(mm)
|
B(mm)
|
C(mm)
|
D(mm)
|
E(mm)
|
|
最小
|
最大
|
|
WYDC-1L、WYDC-0.5D
|
1、±0.5
|
0.5%0.2%0.1%0.05%
|
125
|
30
|
54
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-2L、WYDC-1D
|
2、±1
|
0.5%0.2%0.1%0.05%
|
125
|
30
|
54
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-5L、WYDC-2.5D
|
5、±2.5
|
0.5%0.2%0.1%0.05%
|
125
|
30
|
80
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-10L、WYDC-5D
|
10、±5
|
0.5%0.2%0.1%0.05%
|
125
|
30
|
80
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-20L、WYDC-10D
|
20、±10
|
0.5%0.2%0.1%0.05%
|
148
|
30
|
95
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-30L、WYDC-15D
|
30、±15
|
0.5%0.2%0.1%0.05%
|
148
|
30
|
95
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-40L、WYDC-20D
|
40、±20
|
0.5%0.2%0.1%0.05%
|
168
|
30
|
111
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-50L、WYDC-25D
|
50、±25
|
0.5%0.2%0.1%0.05%
|
168
|
30
|
155
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-100L、WYDC-50D
|
100、±50
|
0.5%0.2%0.1%
|
169
|
30
|
205
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-150L、WYDC-75D
|
150、±75
|
0.5%0.2%0.1%
|
272
|
40
|
265
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-200L、WYDC-100D
|
200、±100
|
0.5%0.2%0.1%
|
300
|
40
|
321
|
15
|
ф20
|
M4 M5 回弹
|
|
WYDC-300L、WYDC-150D
|
300、±150
|
0.5%0.2%0.1%
|
489
|
40
|
485
|
15
|
ф20
|
M5
|
|
WYDC-400L、WYDC-200D
|
400、±200
|
0.5%0.2%0.1%
|
568
|
40
|
644
|
15
|
ф20
|
M5
|
|
WYDC-500L、WYDC-250D
|
500、±250
|
0.5%0.2%0.1%
|
688
|
50
|
749
|
15
|
ф20
|
M5
|
|
WYDC-600L、WYDC-300D
|
600、±300
|
1%0.5%0.2%
|
908
|
50
|
749
|
15
|
ф20
|
M5
|
|
WYDC-700L、WYDC-350D
|
700、±350
|
1%0.5%0.2%
|
950
|
50
|
791
|
20
|
ф20
|
M5
|
|
WYDC-800L、WYDC-400D
|
800、±400
|
1%0.5%0.2%
|
1014
|
50
|
845
|
20
|
ф20
|
M5
|
|
WYDC-900L、WYDC-450D
|
900、±450
|
1%0.5%0.2%
|
1163
|
50
|
1004
|
20
|
ф20
|
M6
|
|
WYDC-1000L、WYDC-500D
|
1000、±500
|
1%0.5%0.2%
|
1247
|
50
|
1088
|
20
|
ф20
|
M6
|
|
WYDC-1200L、WYDC-600D
|
1200、±600
|
1%0.5%0.2%
|
1451
|
50
|
1292
|
20
|
ф20
|
M6
|
|
WYDC-1500L、WYDC-750D
|
1500、±750
|
1%0.5%0.2%
|
1790
|
50
|
1631
|
20
|
ф20
|
M6
|
|
WYDC-2000L、WYDC-1000D
|
2000、±1000
|
1%0.5%0.2%
|
2251
|
50
|
2092
|
20
|
ф20
|
M6
|
注:L为单向,D为双向,如需不同型号和尺寸的传感器可订制作
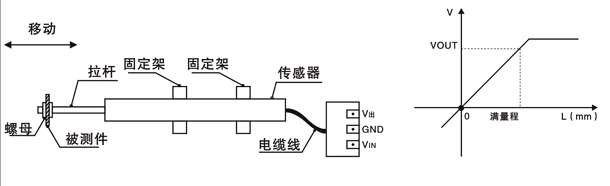
三、安装及使用方法:
拉杆式位移传感器可以任意方向安装,首先将传感器壳体放在参照物(基准)的安装支架孔里,使传感器壳体和被测物移动的方向保持一致,根据传感器的量程,估算大致的间隙,然后用镙母将拉杆和被测物固定起来,通上电源等传感器稳定下来,再慢慢的移动传感器壳体,使传感器的输出零位对应于被测物机械零位,然后将传感器壳体夹紧(不可松动),安装好就可以通过计算机数据采集对被测物的位移进行检测或监测或PLC进行系统控制,回弹式位移传感器和拉杆式位移传感器安装基本相似。
四、电气连接方式:
采用电缆连接,接线见下图:
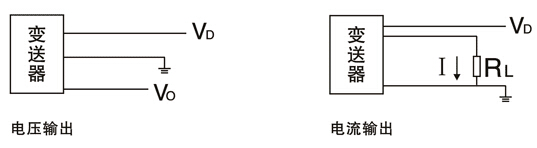
VD 供电电压:6VDC 12VDC 24VDC ±9VDC ±12VDC ±15VDC
VO 输出电压:0—5V 0—10V 0—±5V 0—±10V
输出电流:0—10mA 0-20mA 4-20mA
五、订货须知:
首先将位移传感器的量程确定下来,根据使用情况可以适当放一点余量,并将零点方向在定货中注明,再根据系统的误差要求选择适当 的测量精度,另外请务必告之供电电压,我们可供选择的供电方式有:6VDC 12VDC 24VDC ±9VDC ±12VDC ±15VDC 220VAC(需要配接二次仪表),输出方式也有输出电压:0-5V 0-10V 0-±5V 0-±10V 输出电流:0-10mA 0-20mA 4-20mA,如果您要进行动态测量,请把机械频率的范围在定货中列出来。如果系统需要在高压场合中使用,我们可以采用选进的全不绣钢密封焊接,耐高压0-50MPa,对温度要求比较高,我厂的位移传感器经过特殊工艺处理可以在-40℃—+200℃环境中正常工作。
六、使用注意事项:
1、安装传感器时注意别让铁芯和测杆受大的测向力而造成变形弯曲,否则会严重影响测杆活动的灵活性。传感器的壳体是高导磁材料,应避免趺落和受撞击。
2、传感器测杆(头)应与被测物移动方向保持一致,同心度要好。回弹式位移传感器与被测物的接触面应具有一定光洁度的平面上,凹凸不平会影响测量精度。
3、传感器的有交工作区段一般都在测杆活动区的中间部分。测杆在全部伸出和全压缩的附近区段,均非有效工作区。安装传感器时应调节(挪动)传感器壳体,根据量程估算大致的间隙。 使 位移在预定的变化范围内,也可以用数字电压表对准电气零位,然后进行检测。
4、外接的“正、负”电源建议采用线性电源。若用开关电源,信号输出中的杂波(干扰)电压会明显增大。每块电路板的实际耗电不大于±30mA.(但供电应留有余量,最好不小于±50mA )。
5、若发现测杆受灰尘或油污粘连而造成活动发涩,请用酒精棉擦拭、清洁测杆,但传感器请不可随意折卸,以免损坏或降低测量精度。 |
|